Прекинувач за ограничување на нишање на намотката на врвот на жицата

-

Робусно куќиште
-

Сигурна акција
-

Подобрен живот
Опис на производот
Микро граничните прекинувачи од серијата RL8 на Renew се потрајни и поотпорни на сурови средини, со механички век на траење до 10 милиони операции. Ова е голема предност што ја имаат во однос на стандардните прекинувачи, што е главната причина зошто тешката опрема ги избира. Со флексибилна пружинска прачка, граничните прекинувачи со нишање на намотката со жичен врв можат да работат во повеќе насоки (освен аксијални насоки), прилагодувајќи го нерамномерното порамнување. Совршено е погоден за откривање предмети што се приближуваат од различни агли. Пластичен врв и жичен врв се достапни за различни намени.
Димензии и оперативни карактеристики
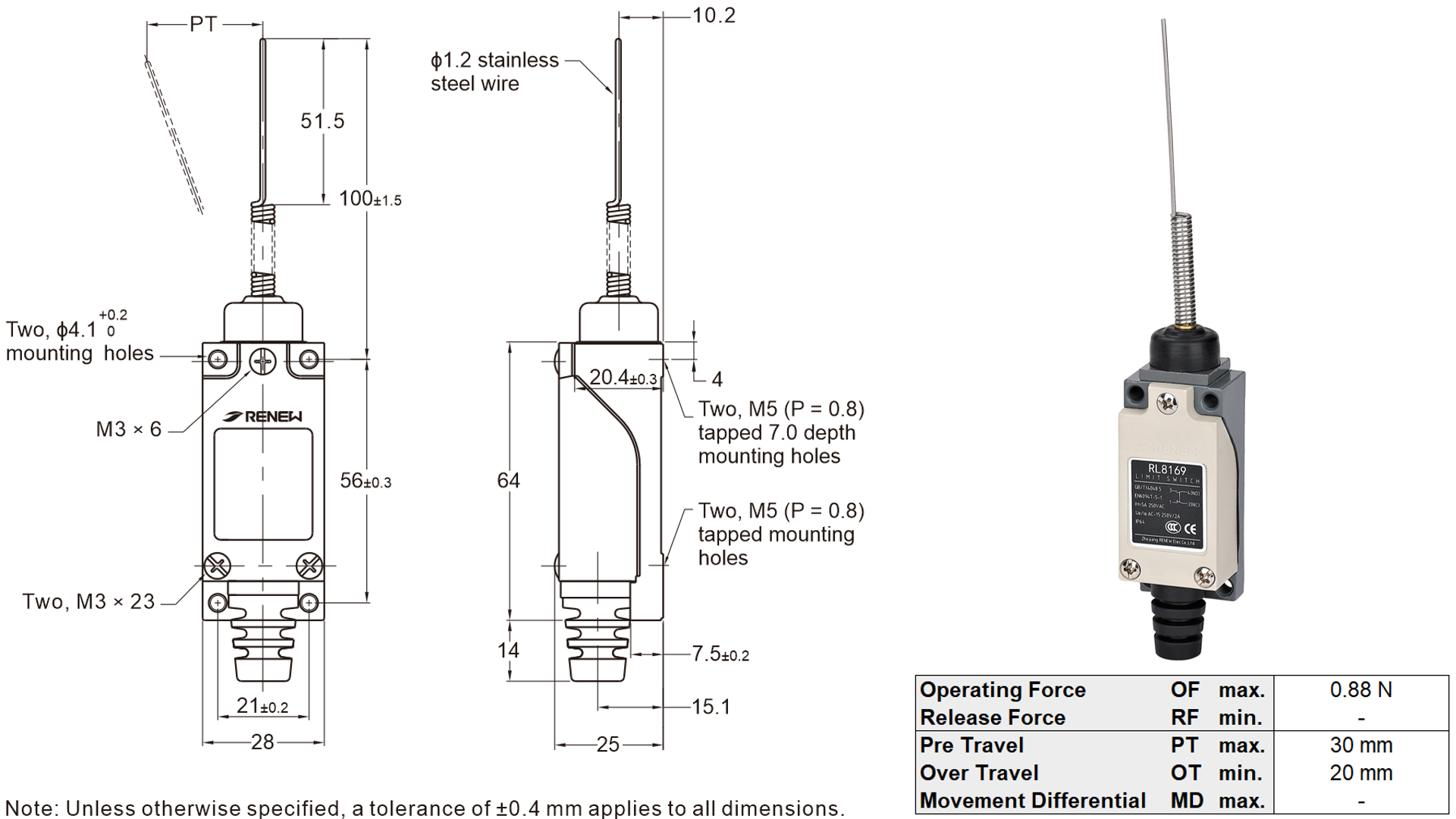
Општи технички податоци
| Амперска рејтинг | 5 A, 250 VAC |
| Отпорност на изолација | 100 MΩ мин. (на 500 VDC) |
| Отпорност на контакт | 25 mΩ макс. (почетна вредност) |
| Диелектрична јачина | Помеѓу контакти со ист поларитет 1.000 VAC, 50/60 Hz за 1 минута |
| Помеѓу метални делови што пренесуваат струја и земјата, и помеѓу секој терминал и метални делови што не пренесуваат струја 2.000 VAC, 50/60 Hz за 1 минута | |
| Отпорност на вибрации за дефект | 10 до 55 Hz, двојна амплитуда од 1,5 mm (дефект: макс. 1 ms) |
| Механички век | 10.000.000 операции мин. (120 операции/мин) |
| Електричен век | 300.000 операции мин. (под номинален отпорен товар) |
| Степен на заштита | Општа намена: IP64 |
Апликација
Минијатурните гранични прекинувачи на Renew играат клучна улога во обезбедувањето на безбедноста, прецизноста и сигурноста на различни уреди во различни области. Еве некои популарни или потенцијални примени.

Овие гранични прекинувачи најчесто се користат во машините за пакување во модерните магацини и паметните фабрики за откривање на пакети со неправилна форма што се движат по транспортни ленти. Флексибилна прачка се свиткува во обликот на пакетот за да се активира прекинувачот. Тие исто така можат да се користат во роботиката и системите за автоматизација за откривање на крајната положба на роботските раце или подвижните делови што можеби не се совршено порамнети секој пат.












